I'm Marge from Haanja.
For the second task my classmates drew and covered the line with black tape. After it was done I started working on the program. I used the EV3 robot.
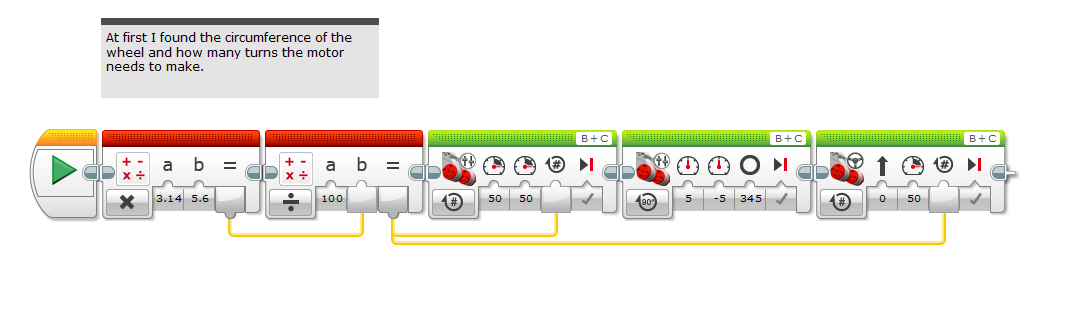
I found the circumference of the wheel and divided with the length of the line to see how many rotations the motor makes. After that I Had to make the robot turn around so I started trying with some random sizes until I found the right size for the turn. The robot kept turning too much and when it drove back it just didn't follow the line anymore. It took a lot of time and many tires, but eventually I succeeded.
It took my robot 15,3 seconds to drive 2 meters.
My robot was driving at 0,13 m/s.
Here is the video: https://drive.google.com/open?id=0B3qwaadSakAcSnRDVzVLVWFnU2M
I´m Carmen from Türi.
1. My OzoBot drove forward 1 meter, turned around and came back.
Time was 60,2 seconds. Distance was 2 meters. Speed was 30,1 seconds.

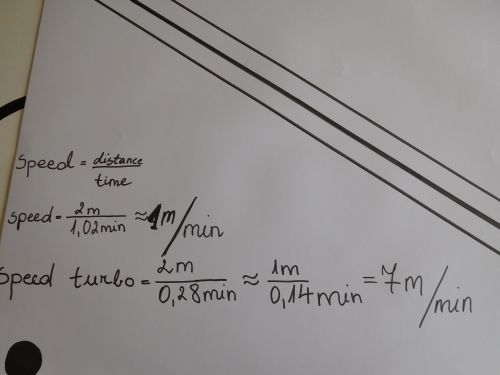
2. I added the turbo, OzoBot drove forward 1 meter, turned around and came back.
Time was 28 seconds. Distance was 2 meters. Speed was 14 seconds.