I'm Karl from Haanja. We started making the polygon, but it didn't workout with the compass. It wasn't precise so we made a diagonal line of 100cm and made 60° angles until we reached the starting point. Then we followed the line with tape.

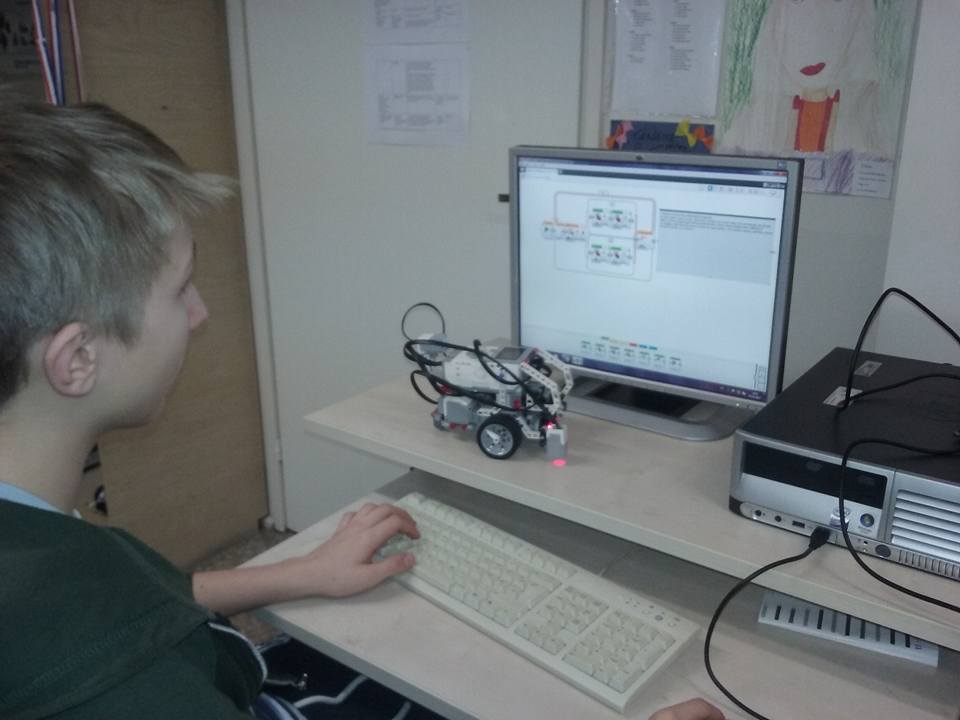
Today i programmed the robot.
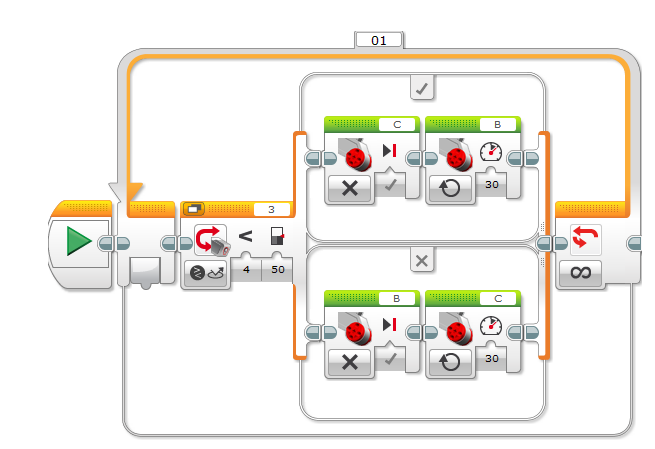
I made a basic line following program.
It was quite easy to do, because i made an exact copy of the first premade program on this page. http://www.legoengineering.com/inside-a-two-step-simple-line-follower/
It wiggles like that because when it sees white, one motor stops and the other steers it back on course.
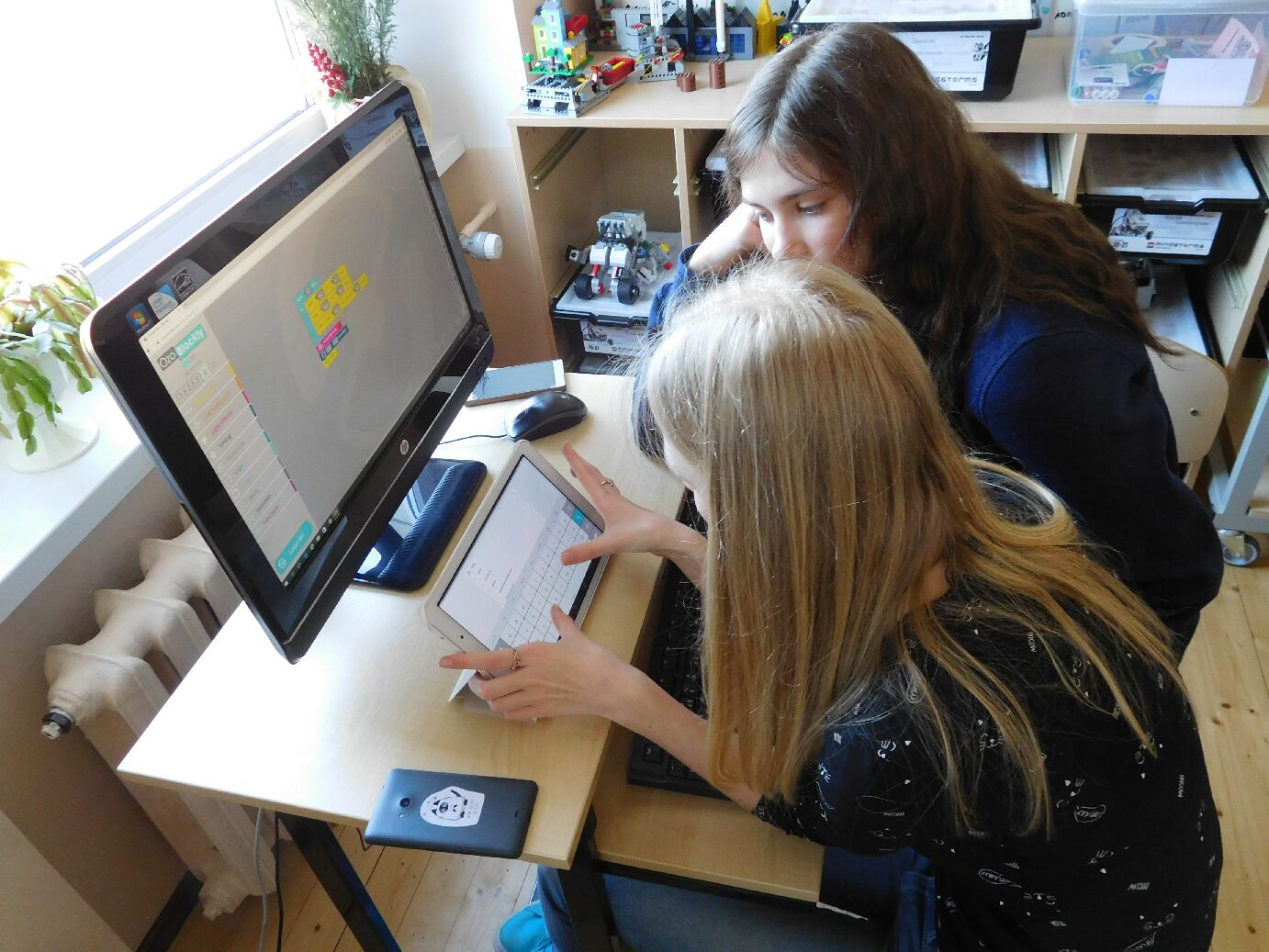
We have Eddison robot. we are the group from Norway. the eddison robot is a robot with weals. we program the robot on an app on our pc. task one was a bit hard. it dident go perfekt around the square. but it did good. we dident finished task one because we dident have time. but we come haf way trough so we did a bit.
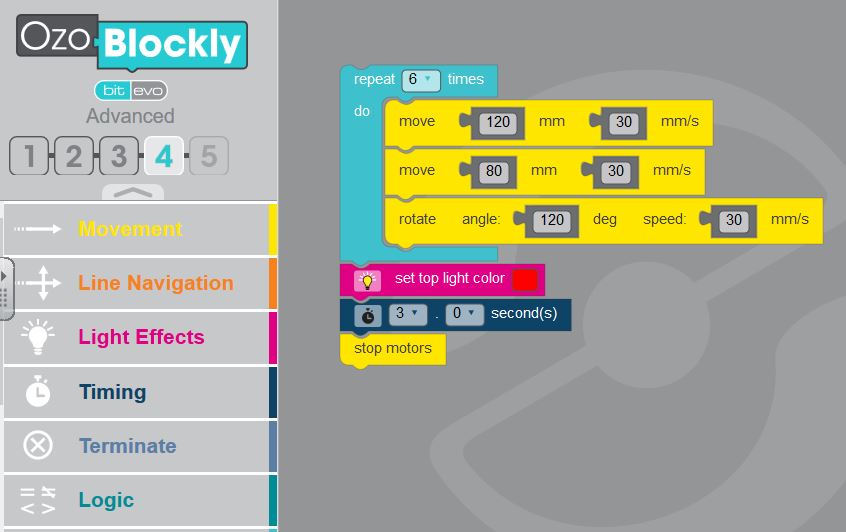
I´m Anette from Türi. We have Ozobot robot.

We made a hexagon. One corner was 120 degrees.
Then we programmed our Ozobot to move in a hexagon shape. This is the programm of our robot: