I´m Jan-Kustav from Haanja.
We made our polygon at first with the compass, but the compass wasn´t very precise and we had to make diagonal lines to get a really precise result.

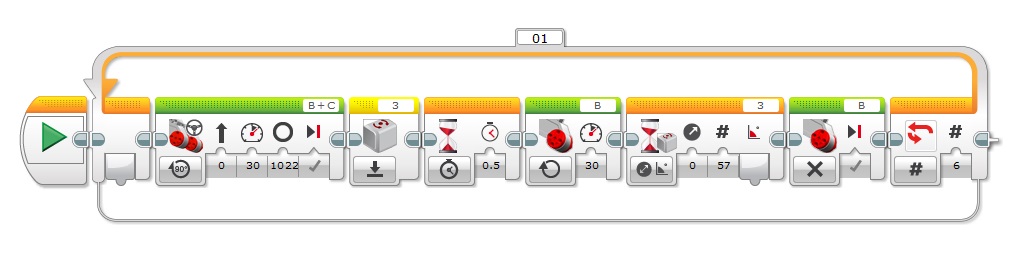
My robot goes in a straight line and resets the gyro sensor, then only B engine works, until it has turned 60 degrees
Hi, i´m Jaanika from Türi.
First I made a hexagon, which was pretty easy, because I made it inside a circle.
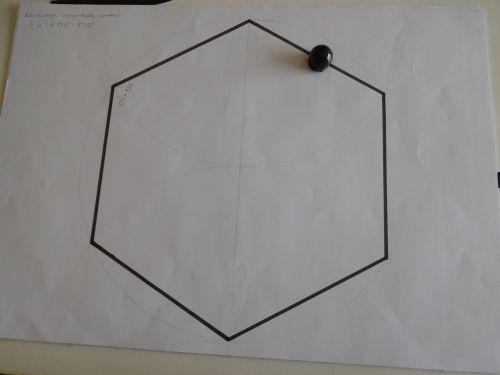

We made a hexagon. One corner was 120 degrees.
Then we programmed our Ozobot to move in a hexagon shape. This is the programm of our robot