Welcome visitors! You are reading a public project summary for AntMind. Listen to our story and get amazing resources and experience to use in your projects or at home.
Are you an eTwinning committee member? Please note we have dispensed guest login information with the application to allow you access to all materials.
An object of interest
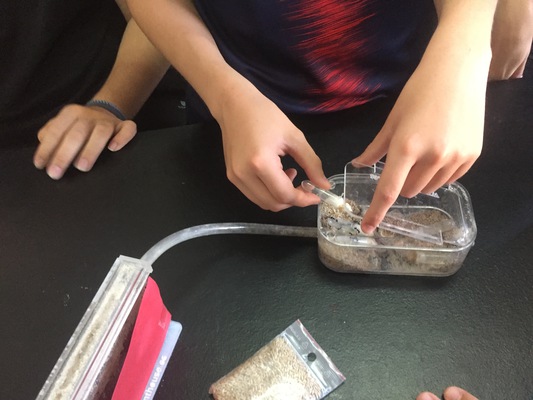
It all began with adopting a peculiar pet: an ant colony. Both schools found queen ants native to their environment and grew them into a sizeable colony in biology classes. These colonies are still thriving even after the conclusion of the project and will serve as living learning aids in biology. The formicaria allowed detailed observation of their movement. This allowed us map their food seeking behavior and bootstrap the entire research project.

AntMinders Assemble
The Czech and Catalonian students met up in the safe virtual environment of TwinSpace and broke the ice by assigning their video introductions to pictures. Being well acquainted with the TwinSpace system and individual project participants, it was easy for them to form teams. Each team consisted of 2 Czech and 2 Catalonian student. To promote team identity and healthy competition a logo designing contest was held. Each team proposed a logo for the AntMind project and all participants voted for the best design.
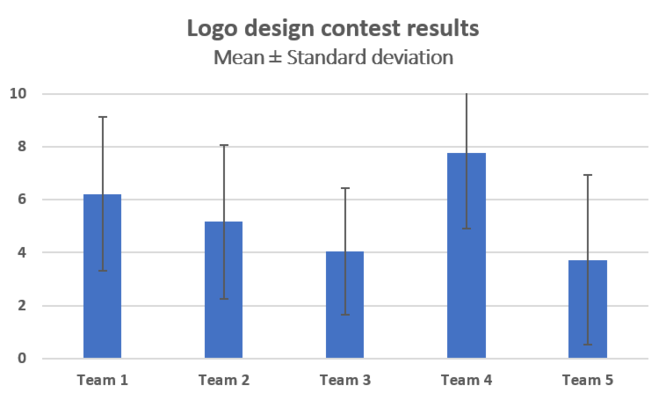
Winning design:

Curious Question
By observing the ants in a natural (field reseach, documentaries) and controlled environment (our formicaria) we have noticed how they look for food and cooperate to bring it to the nest. It seems as if they were able to communicate with each other and remember where the food was. No matter where we placed the bead of honey, they found the most efficent way to reach it and come back. We were surprised by this, because we knew insects have very simple nervous systems. How could they solve problems which probably need a lot of abstraction to grapple with? We remembered ants workers are not themselves organisms. Rather, the entire colony forms one superorganism with many bodies acting as its parts. This lead us to believe that evens simple minded workers, when working together must lead to the whole system working efectively.
The hypothesis
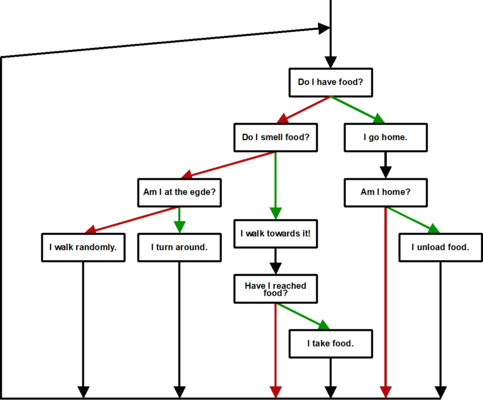
Observation, literature review and reasoning lead us to formulate an exciting hypothesis: simple individual behavior can create complex patterns in the entire system. To test this, we decided to create a model of the ants "brain". It took the shape of a decision tree, describing what decisions and in what order each worker ant has to make. We called it the AntMind. Each team came up with their ideas on what these decision should be, presented them and one compromise was chosen as a starting point. The teams will later be encouraged to incorporate their own ideas.
Ant ex machina
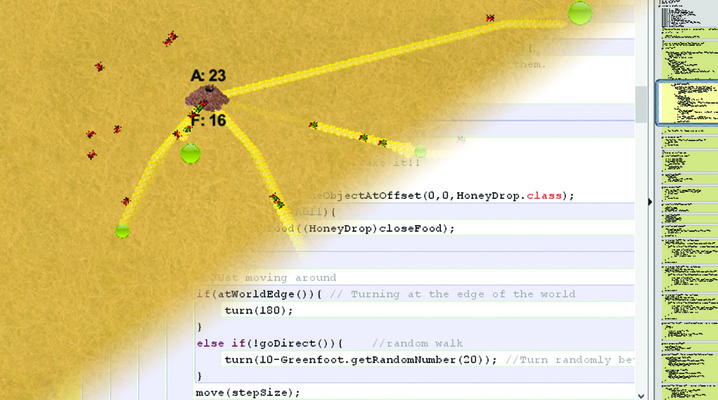
Greenfoot was chosen as the environment to create our virtual ants. It's a free Java/Stride based platform with plenty of in-built functions which make teaching&learning easy and allow you to visualize your code. If you are unfamiliar with Greenfoot, don't hesitate to try it. We knew if our artificial ants behaved the same way as their real-life counterparts, our hypothesis must have been quite accurate. So began the coding stage.
Baby steps
Most of our students had no experience with coding, so the teachers took the role of mentors. Through a series of activities they motivated them to learn basics of Java. During this process all teams advanced their model in the same direction. To break up the coding, teams were asked to create graphics to be used in the project.
Are you a teacher who would like to use antMind codes and supporting material? Contact us via eTwinning or by email (psoukup@cag.cz) to get a teacher package. Also see resources provided below.
In vivo as in silico
By examining the model we came to the conclusion that simple AI is indeed sufficient to create efficient food foraging behaviors such as we saw in live ants. Thy hypothesis is proven. But there is still so much space for improvement! For example, we didn't see our virtual ants form pheromone trails, such as some species do in nature. Here the teachers receded into background, only giving advice to the student developers when needed.

Evolve!
All teams had lovely ideas how to make their model more realistic, more efficient, or just more fun. This is where their newly aquired coding skill served to satisfy their wonderful imagination. Suddenly, no model was alike. Some chose to rebalanace the ants' senses to promote realism. Others implemented pheromone trail forming capability, greatly increasing model ants' efficiency, especially on long distances. Many amused themselves by adding predators who'd chase the ants. And several models also accounted for food replenisment and ant reproduction.
Spread the word
The teams created wonderful simulations and took part in a highly stimulating scientific inquiry. It is time to make sure we can present our results and perhaps inspire others to code, and wonder, and learn. To do so, we have shared our results on social media and created a video "documentary" about our efforts.
Share the love
We are happy to share the results of our work. All following codes are redistributable under the GNU General Public License version 2 with the Classpath Exception.
Teacher proofed progression snapshots of the common model:
01-constructors and functions.zip
02-making ants move.zip
03-filling-the-world.zip
04-in-search-of-food.zip
Final models presented by the teams:
team1.zip
team2.zip
team3.zip
team4.zip
team5.zip
Team five submitted a more realistic model and additionally one turned into a minigame. They are in separate folders within the archive.
Motivating scientific literature:
We are not at liberty to dispense fulltext articles, but these citations will help you obtain them via your institutions' subsription.
Bles, O., Boehly, T., Deneubourg, J. L., & Nicolis, S. C. (2018). Same length, different shapes: Ants collectively choose a straight foraging path over a bent one. Biology Letters, 14(3). https://doi.org/10.1098/rsbl.2018.0070
Dorigo, M., Maniezzo, V., & Colorni, A. (1996). Ant system: Optimization by a colony of cooperating agents. IEEE Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics. https://doi.org/10.1109/3477.484436
Traniello, J. (1989). Foraging Strategies Of Ants. Annual Review of Entomology, 34(1), 191–210. https://doi.org/10.1146/annurev.ento.34.1.191