Open Roberta is the name of a project within the German education initiative "Roberta—Learning with robots", initiated by Fraunhofer IAIS, which is an institute belonging to the Fraunhofer Society. With Open Roberta Fraunhofer IAIS is looking to encourage children to code by using robots such as Lego Mindstorms, and other programmable hardware systems such as Arduino, BBC micro:bit, and the Calliope mini. The Cloud-approach of the Open Roberta Lab is intended to simplify programming concepts and make it easier for teachers and schools to teach how to code. Open Roberta is free and does not require any installation. The project was initially founded with €1m by Google.org.
The programming platform Open Roberta Lab is open source developed. Both the software as well as the open source development tools are available on a server of Fraunhofer Society.

NEPO is a free open source meta programming language that can be used by students, scholars, teachers, and other interested persons within the Open Roberta Lab. NEPO translates to New Easy Programming Online (or simply OPEN read backwards). NEPO is the name of the graphical programming language and its coupled hardware connection layer. NEPO uses the freely available Blockly library. In addition within NEPO there are additional functionalities and improvements which have been adapted for Open Roberta. The programming paradigm of NEPO is inspired by Scratch, which was developed by the Massachusetts Institute of Technology. A NEPO block always represents and encapsulates a certain robot functionality. A blocks feature set can easily be recognized through the associated block category, for example »sensors«. Programming with NEPO follows a simple principle. The blocks are interconnected and will be executed by the robot according to their order. This principle is called "sequential operation."
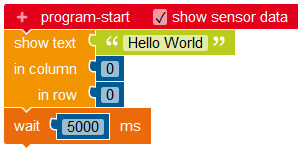
All available blocks are listed and categorized as the Action, Sensors, Control, Logic, Math, Text, Colours, Variables, Functions, and Massages as shown in the table below.

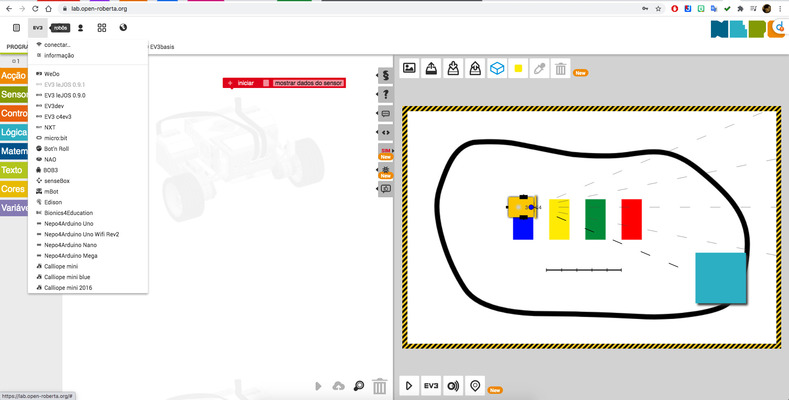
Since version beta 1.3.0 the Open Roberta Lab also offers a simulation environment. This is a simulation of a two-dimensional robot model equipped with two wheels. To program the simulated robot also the programming language NEPO may be used. The simulated 2D model includes the simulation of an ultrasonic sensor, a touch sensor, a color sensor and the display of an LED. In addition, different environments can be chosen. Since version beta 1.4.0 NEPO blocks can used without any changes for the 2D-Simulation and the real robot.
Links about Open Roberta: